Débitmètre#
Information de montage
Nous vous invitons à vous réferer à ce document pour assembler la centrale SETIER Débit. Le coût du matériel nécessaire au montage est, au 09/02/2026, de 358,71 Euros (pour une centrale avec 2 Capteurs). Le temps nécessaire au montage et à la programmation de cette centrale est de 6 heures. Pour cet assemblage, il est conseillé de vous placer dans une salle éclairé et calme, certaines étapes pouvant-être minutieuse. Assurez d’avoir l’ensemble du matériel et des outils nécessaires avant de débuter l’assemblage. Les listes d’outils et de matériels sont fourni dans la suite de la présente documentation.

Informations
SETIER est un projet participatif ouvert à tous, cependant l’assemblage des Centrale Setier associés requiere le respect des règles de sécurités associées à l’utilisation de cartes électroniques notamment. Les Centrale Setier doivent être assemblés dans un contexte professionel par des personnes ayant des connaissances en électronique. L’équipe SETIER ne peut en aucun cas être responsable de tout dommage matériels ou humain qui pourrait subvenir lors de l’assemblage ou de l’utilisation d’un Centrale Setier. De plus, l’équipe SETIER ne pourra être portée responsable si le Centrale Setier ne fonctionne pas à la fin de l’assemblage.
You may redistribute and modify this documentation and make products using it under the terms of the CERN-OHL-P v2 (https:/cern.ch/cern-ohl). This documentation is distributed WITHOUT ANY EXPRESS OR IMPLIED WARRANTY, INCLUDING OF MERCHANTABILITY, SATISFACTORY QUALITY AND FITNESS FOR A PARTICULAR PURPOSE. Please see the CERN-OHL-P v2 for applicable conditions.
Données Techniques#
Données représentant les différents paramètres associés à l’utilisation de la centrale débitmétrique.
Paramètres |
Spécifications |
Unités |
Tension d’entrée (VCC) |
7 - 15 |
V |
Intervalle de mesures |
100 - 1500 |
mm |
Précision de mesures |
1 |
mm |
Résolution |
0.1 |
mm |
Pourcentage d’erreur |
+/- 0.1 |
% |
Résolution (T°C) |
0.1 |
°C |
Erreur de température |
+/-1 |
°C |
Température d’utilisation |
-20 - 80 |
°C |
Fréquence de mesure |
30 |
Hz |
Cône d’émission ultrason |
12 +/-2 |
° |
Etanchéité du capteur |
IP65 |
|
Interface de communication |
||
Stockage des données |
micro SD card |
Matériel et outils nécessaires#
Afin d’assembler la centrale débitmètre SETIER, le matériel nécessaire est le suivant :
Liste du matériel :
Component |
Number |
Cost per unit € |
Total cost € |
Manufacturer |
Ref. manufacturer |
Web reference |
|---|---|---|---|---|---|---|
Arduino MKR Wifi 1010 |
1 |
33.61 |
33.61 |
Arduino |
782-ABX00023 |
https://www.mouser.fr/ProductDetail/Arduino/ABX00023?qs=%252BEew9%252B0nqrAwxv2YQYWyPw%3D%3D |
Arduino MEM Shield |
1 |
19.55 |
19.55 |
Arduino |
782-ASX00008 |
https://www.mouser.fr/ProductDetail/Arduino/ASX00008?qs=%252BEew9%252B0nqrB6JgKBlp7dtg%3D%3D |
Arduino MKR Connector Carrier |
1 |
19.4 |
19.4 |
Arduino |
782-ASX00007 |
https://www.mouser.fr/ProductDetail/Arduino/ASX00007?qs=%252BEew9%252B0nqrD3EEw%252BoCBXVA%3D%3D |
Grove RS 485 |
1 |
4.69 |
4.69 |
Seeed-Studio |
713-103020193 |
https://www.mouser.fr/ProductDetail/Seeed-Studio/103020193?qs=vLWxofP3U2x0rKlJJj8lVg%3D%3D |
Gravity RTC |
1 |
7.4 |
7.4 |
DFRobot |
426-DFR0469 |
https://www.mouser.fr/ProductDetail/DFRobot/DFR0469?qs=EU6FO9ffTwe22wh0PfInCA%3D%3D |
Grove Voltage divider |
1 |
5.55 |
5.55 |
Seeed-Studio |
104020000 |
https://fr.farnell.com/seeed-studio/104020000/voltage-divider-board-arduino/dp/4007781?ost=104020000 |
Spacer M2x2cm |
11 |
0.808 |
8.89 |
Wurth-Elektronik |
710-971200244 |
https://www.mouser.fr/ProductDetail/Wurth-Elektronik/971200244?qs=wr8lucFkNMW86Ww6MhRnZQ%3D%3D |
Nut M2 |
5 |
7.41 |
7.41 |
Wurth-Elektronik |
560-271 |
|
Screw M2x8mm |
6 |
4.48 |
4.48 |
RS-PRO |
908-7637 |
|
Spacer M3x2cm |
6 |
1.08 |
6.48 |
Wurth-Elektronik |
710-971200354 |
https://www.mouser.fr/ProductDetail/Wurth-Elektronik/971200354?qs=wr8lucFkNMXVQ0nS%2FAg5sw%3D%3D |
Screw M3x8mm |
6 |
4.28 |
4.28 |
RS-PRO |
908-7661 |
|
Nut M3 |
6 |
8.18 |
8.18 |
Wurth-Elektronik |
560-293 |
|
Box Polycarbonate 344x289x117mm IP65 |
1 |
40.36 |
40.36 |
RS-PRO |
197-2014 |
|
Pushbutton |
1 |
8.5 |
8.5 |
ITW Switches |
265-0635 |
|
Grove Screw Terminal |
1 |
1.9 |
1.9 |
Seeed-Studio |
713-103020007 |
https://www.mouser.fr/ProductDetail/Seeed-Studio/103020007?qs=1%252B9yuXKSi8B56dS97ffOlA%3D%3D |
SEN0358 Sensor |
1 |
85.14 |
85.14 |
DFRobot |
426-SEN0358 |
https://www.mouser.fr/ProductDetail/DFRobot/SEN0358?qs=IS%252B4QmGtzzpqTBuEwj0fFQ%3D%3D |
Female panel connector IP68 21mm 2 contacts |
1 |
19.3 |
19.3 |
RS-PRO |
124-6674 |
https://fr.rs-online.com/web/p/connecteurs-circulaires-industriels/1246674?gb=a |
Male cable connector IP68 21mm 2 contacts |
1 |
21.89 |
21.89 |
RS-PRO |
124-6683 |
|
AC/DC 3V Adaptator |
1 |
12.75 |
12.75 |
RS-PRO |
206-4908 |
|
WAGO 221 5 levers |
2 |
9.57 |
9.57 |
WAGO |
221-415 |
|
PVC panel |
1 |
1 |
3D Print |
|||
Cable gland |
1 |
15.1 |
15.1 |
RS-PRO |
822-9653 |
|
Micro SD Card 16Go |
1 |
12.09 |
12.09 |
SanDisk |
467-SDSDQAB-016G |
https://www.mouser.fr/ProductDetail/SanDisk/SDSDQAB-016G?qs=EgF7oUuTQmp8cNxoHCNycQ%3D%3D |
USB µUSB connector |
1 |
2.19 |
2.19 |
Qualtek |
562-3025033-01 |
https://www.mouser.fr/ProductDetail/Qualtek/3025033-01?qs=1mbolxNpo8c5JqM9YiGl1Q%3D%3D |
Pressure compensation |
1 |
18.50 |
18.5 |
Schneider Electric |
177-8973 |
Il vous sera également utile d’avoir ces différents outils :
|
|










Etape 1 : Assemblage de la partie électronique#
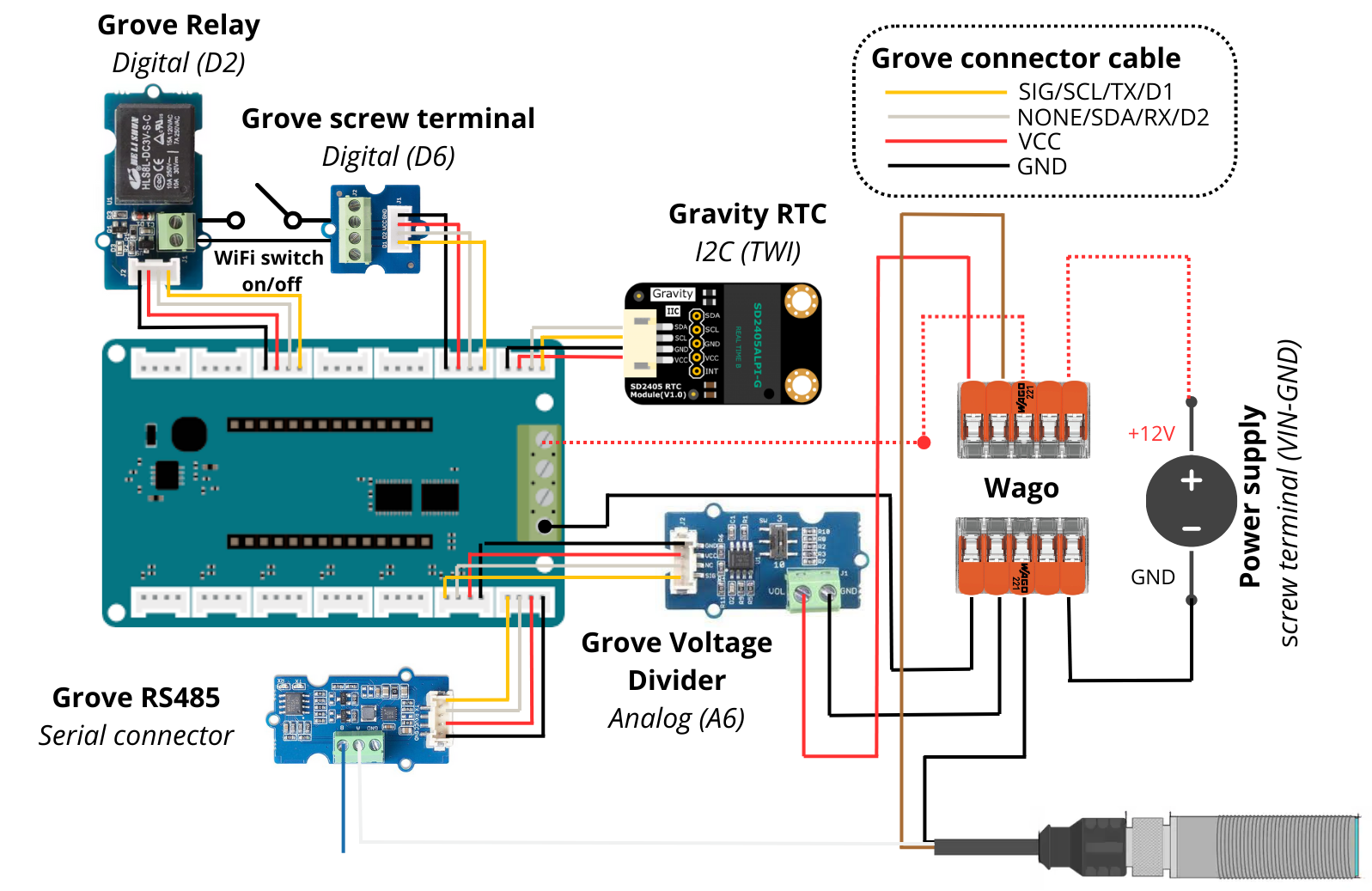
La première partie consiste à assembler les différentes cartes électroniques composant le Centrale Setier, pour obtenir le câblage suivant le schéma ci-dessous.
Schéma électronique#
1. Assemblage des cartes Arduino MKR#
Ces cartes permettent le pilotage des différents éléments connectées au Datalogger (capteur, bouton…) ainsi que l’enregistrement des données associées (mesure, date…).
Insérer la carte Arduino MKR MEM Shield sur la carte Arduino MKR Connector Carrier, puis insérer la carte Arduino MKR Wifi 1010 sur la carte Arduino MKR MEM Shield.
Le résultat obtenu est le suivant.
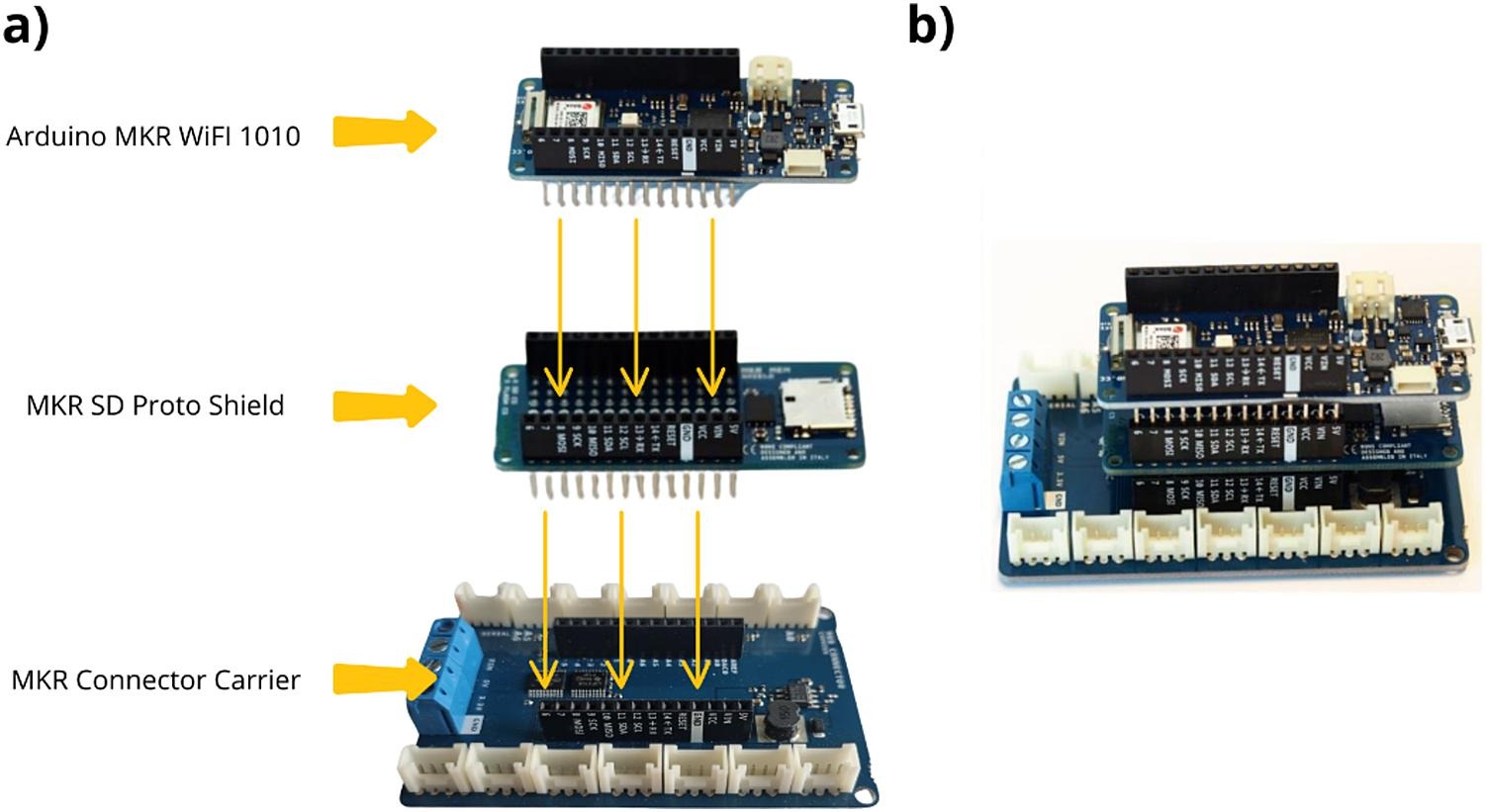
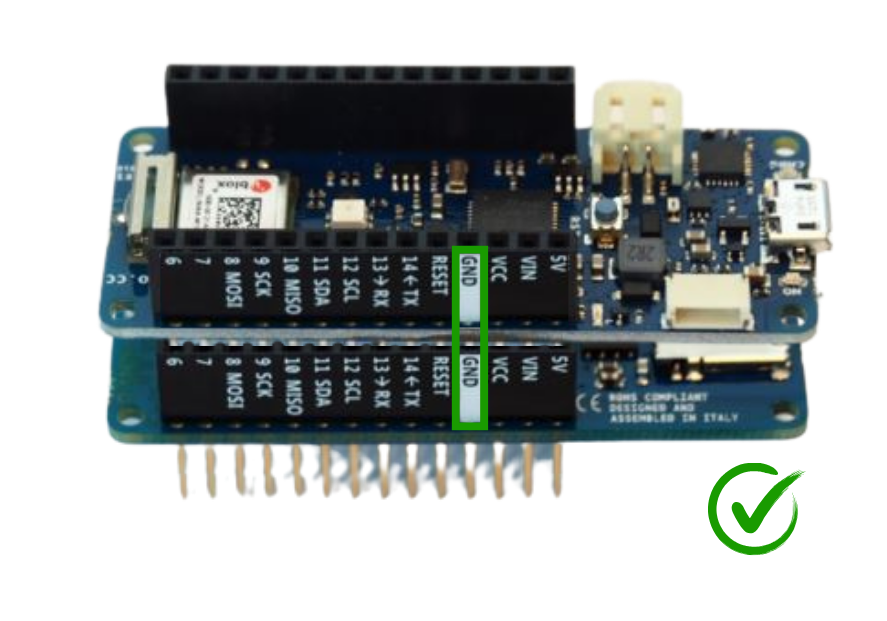
Attention
Les trois cartes electroniques doivent être empilés dans le bon sens (Pin GND sur Pin GND par exemple).
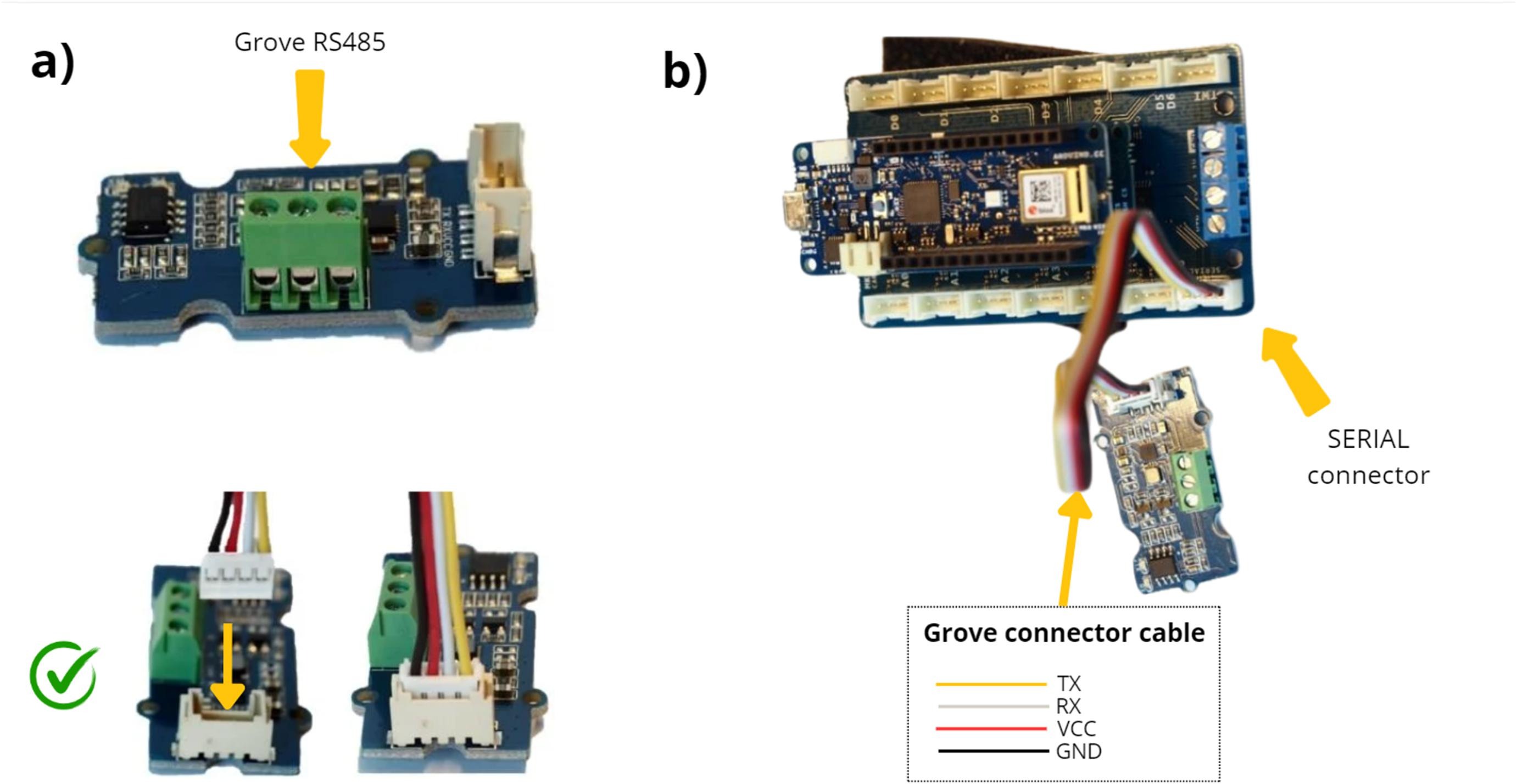
2. Branchement du Module Grove RS485#
Ce module permet de connecter un outil/capteur utlisant le Protocole de communication RS485.
Prendre la Module Grove RS485 et brancher le câble Connecteur Grove fourni avec.
Brancher l’autre côté du câble de la carte Module Grove RS485 vers le port « SERIAL » de la carte Arduino MKR Connector Carrier.
3. Branchement du Module Gravity RTC#
Le Module Gravity RTC gère la temporalité des données enregistrées (RTC = Real Time Clock).
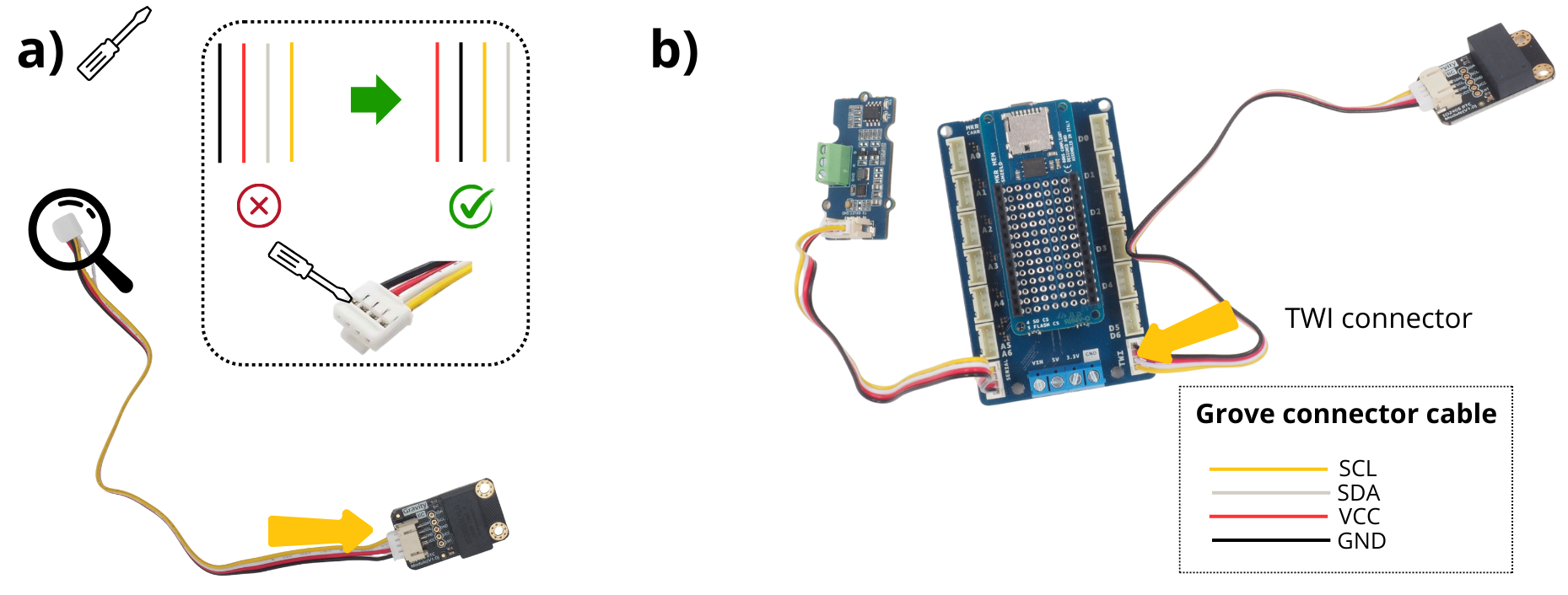
Prendre le module Module Gravity RTC et brancher le câble Connecteur Grove fourni avec. Sur l’autre extrémité du câble, utilisé un tournevis plat fin afin d’inverser le câble rouge et noir, ainsi que le câble blanc et jaune.
Voir aussi
Afin de mieux comprendre comment inverser ces câbles, voir la vidéo suivante : https://www.youtube.com/watch?v=0G7iIwfuaJ8
Brancher l’autre côté du câble de la carte Gravity RTC vers le port « TWI » de la carte Arduino MKR Connector Carrier.
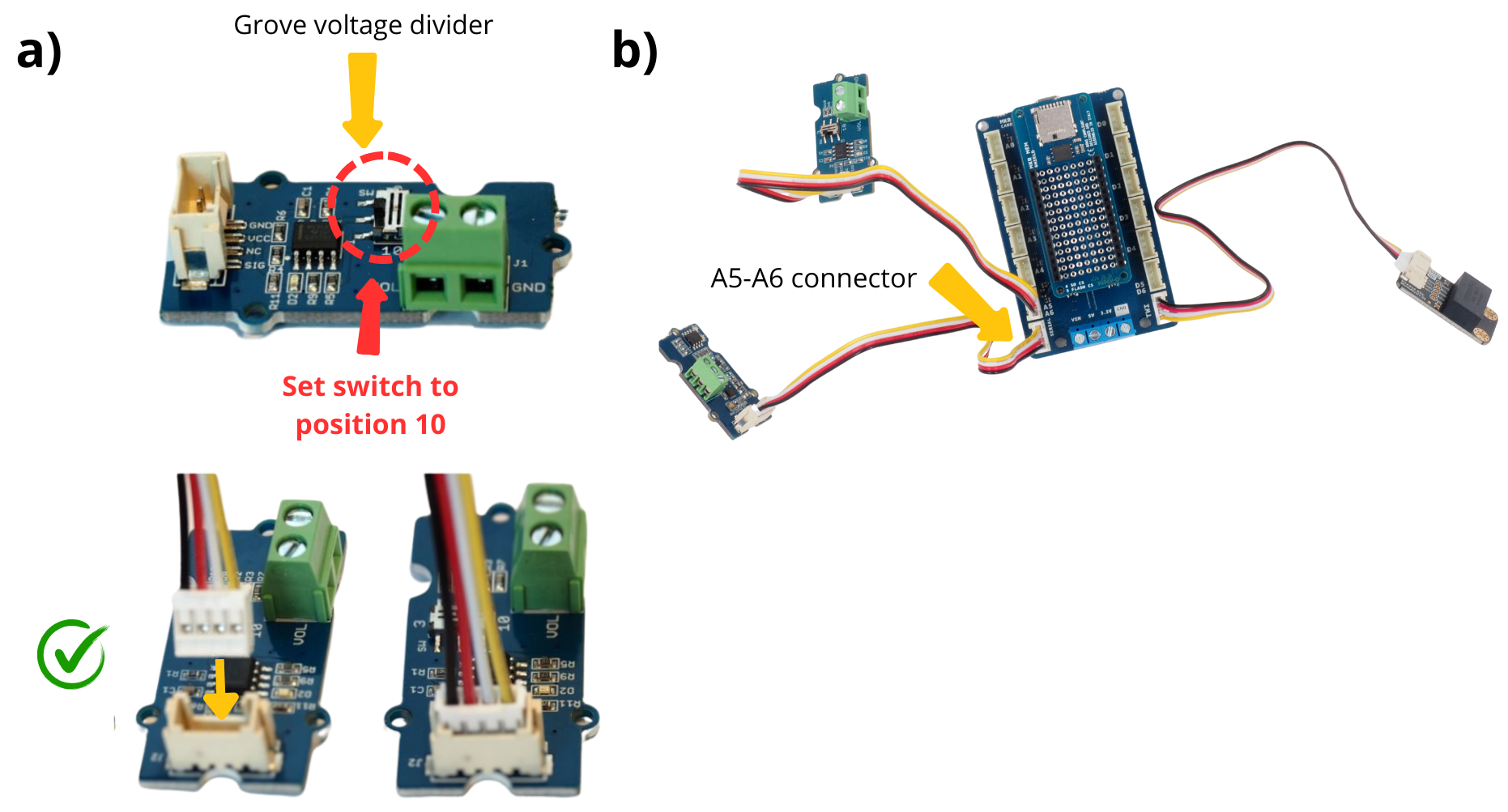
4. Branchement du Module Grove Voltage Divider#
Ce module permet de mesurer la tension de batterie du système. Le sytème étant alimenté en 12 V, il est important de changer la position du Switch.
Prendre le Module Grove Voltage Divider et brancher le câble Connecteur Grove fourni avec. Switcher le curseur de la position initial 3 à la position 10.
Brancher l’autre extrémité du câble en provenance du Module Grove Voltage Divider dans le port « A5-A6 » de la carte Arduino MKR Connector Carrier.
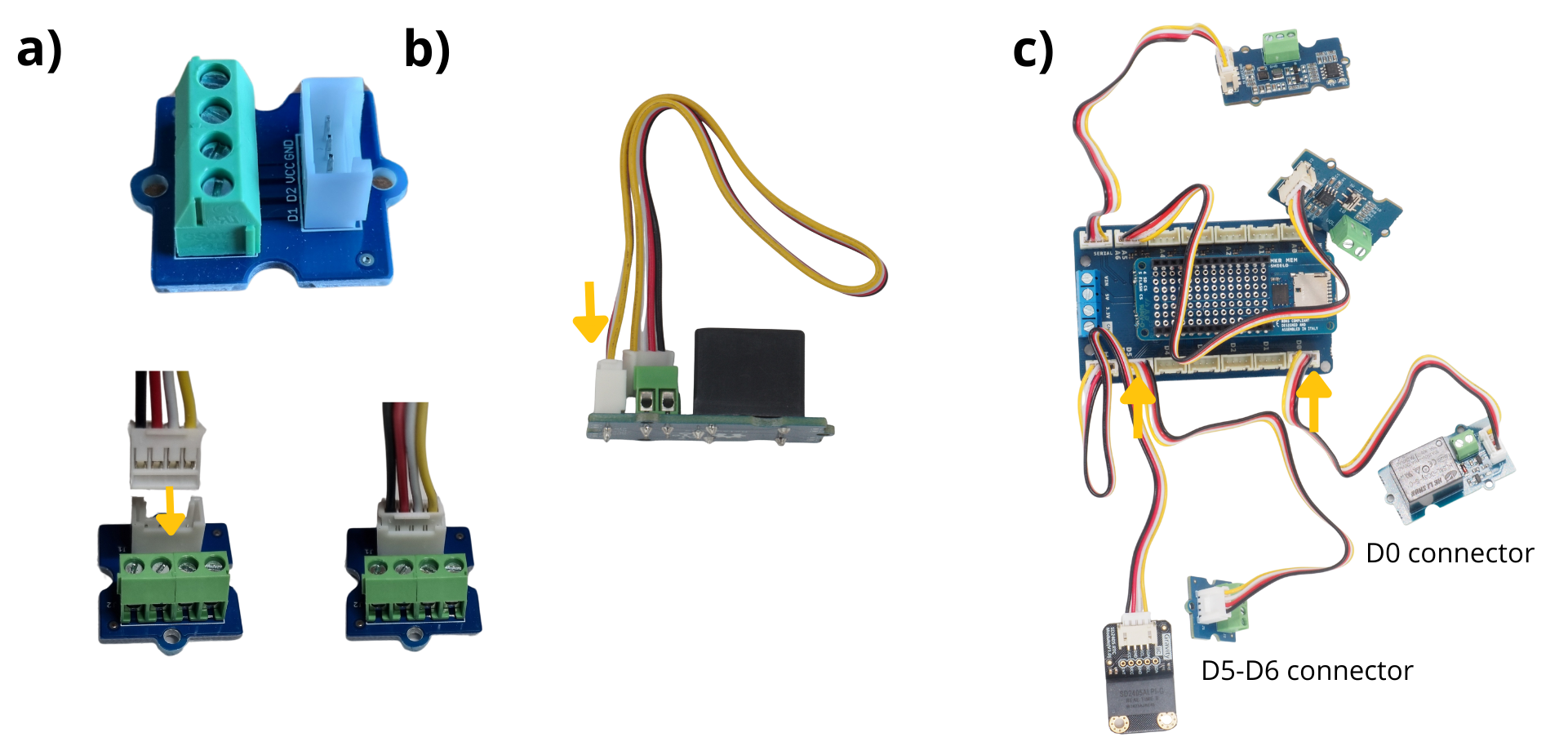
5. Branchement du Module Grove Screw Terminal et Module Grove Relay#
Le module Module Grove Relay permet de piloter l’alimentation électrique d’un composant, comme un interrupteur. Il sert ici à piloter le bouton poussoir. Le module Module Grove Screw Terminal permet d’interfacer à l’aide de câbles différents éléments qui seront ensuite gérés par le microcontrôleur. Ici, il permet d’interfacer le bouton poussoir.
Prendre le module Module Grove Screw Terminal et brancher le câble Connecteur Grove fourni avec.
Prendre le Module Grove Relay et brancher le câble Connecteur Grove fourni avec.
Brancher le module Module Grove Screw Terminal sur le port « D5-D6 » de la carte Arduino MKR Connector Carrier. Brancher le module Module Grove Relay sur le port « D0 ».
Etape 2 : Assemblage de la partie mécanique#
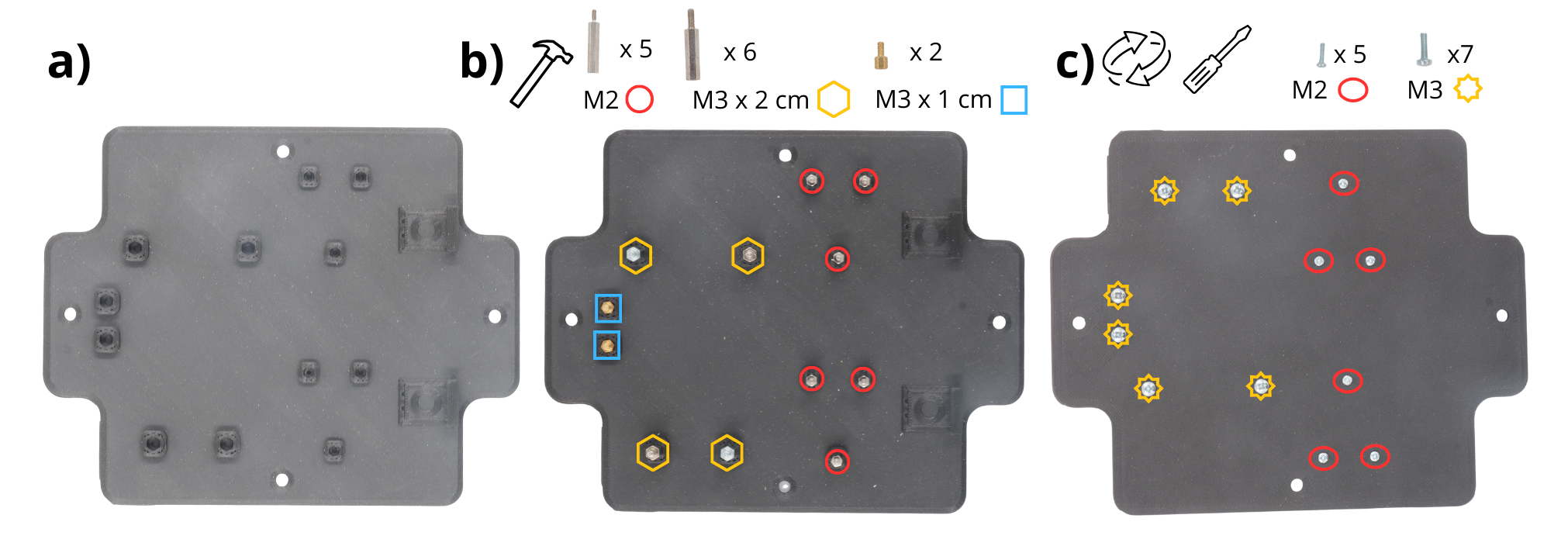
1. Préparation du support fond de panier#
Ici sera détaillée l’utilisation d’une plaque imprimée. Si vous ne possédez pas d’imprimante 3D, vous-pouvez vous adresser à un Fablab à proximité de chez vous.
Prendre la plaque.
Insérer les Entretoise M2 de 1.5 cm, Entretoise M3 de 2 cm, et Entretoise M3 de 1 cm dans les trous prévus à cet effet. Elles peuvent être insérées dans les deux sens, au choix. Selon le choix effectués ici, les étapes suivantes nécessiteront peut-être d’avantage d’écrous ou de vis. Vous pouvez utiliser un marteau pour les enfoncer plus profondément.
Retourner la plaque, et insérer les vis M2 et les vis M3 dans les trous prévus à cet effet afin de fixer les Entretoise.
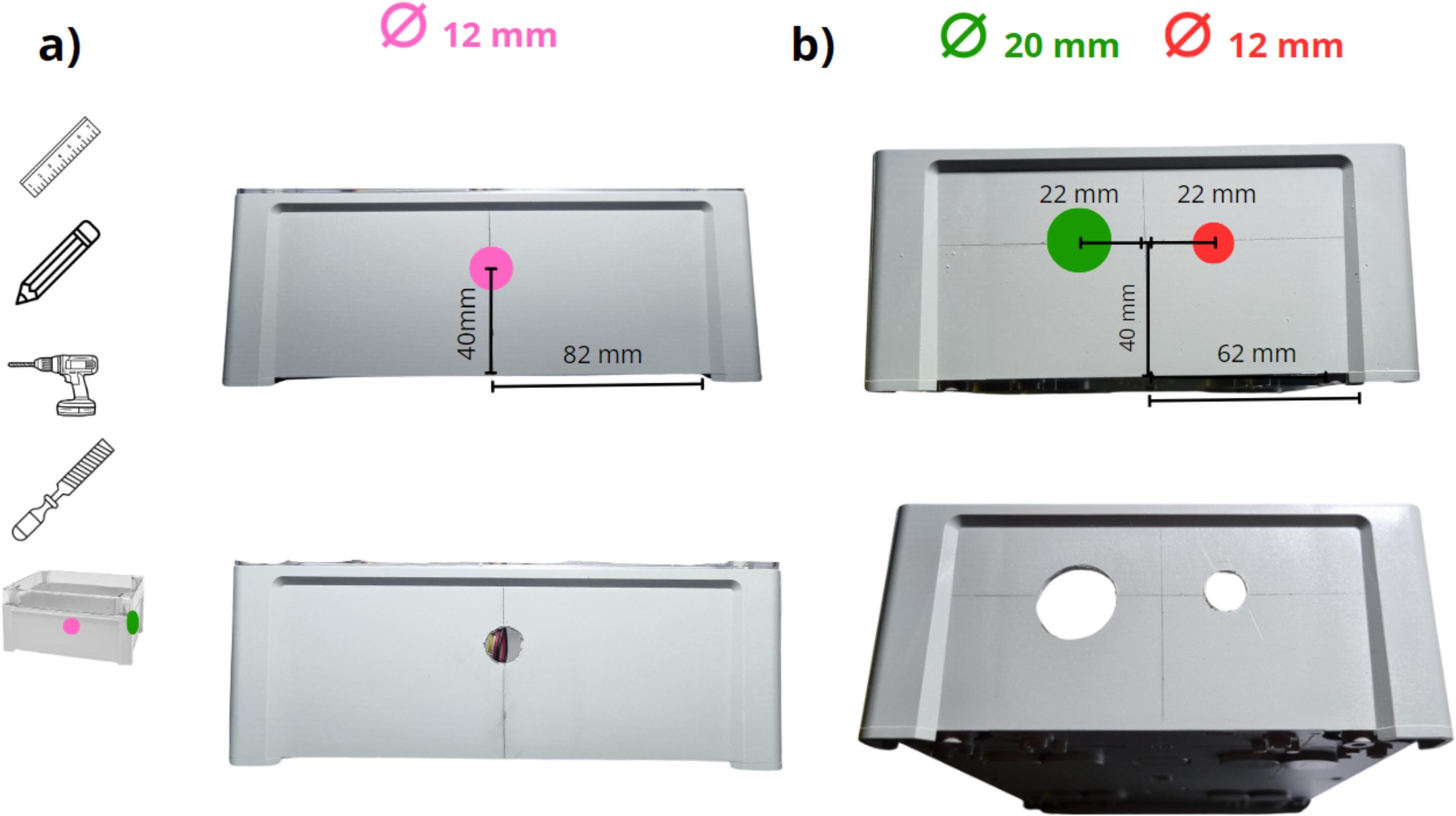
Prendre la boîte, et percer un trou de 12 mm de diamètre sur le côté le plus long (voir indication ci-dessous).
Prendre la boîte, et percer un trou de 20 mm de diamètre sur le côté le plus court, ainsi qu’un trou de 12 mm de diamètre (voir indication ci-dessous).
Placer la plaque à l’intérieur de la boîte, et insérer les 2 Borne de connexion WAGO dans les supports prévus à cet effet.
Fixer la plaque dans la boîte à l’aide des 4 vis fournies avec la boîte.
2. Placement et fixation des cartes Arduino et Grove#
Note
Pour les étapes qui suivent, il vous sera réguliérement demandé de fixer à l’aide de visser les différents composants. Il n’est pas nécessaire de forcer au moment du vissage.
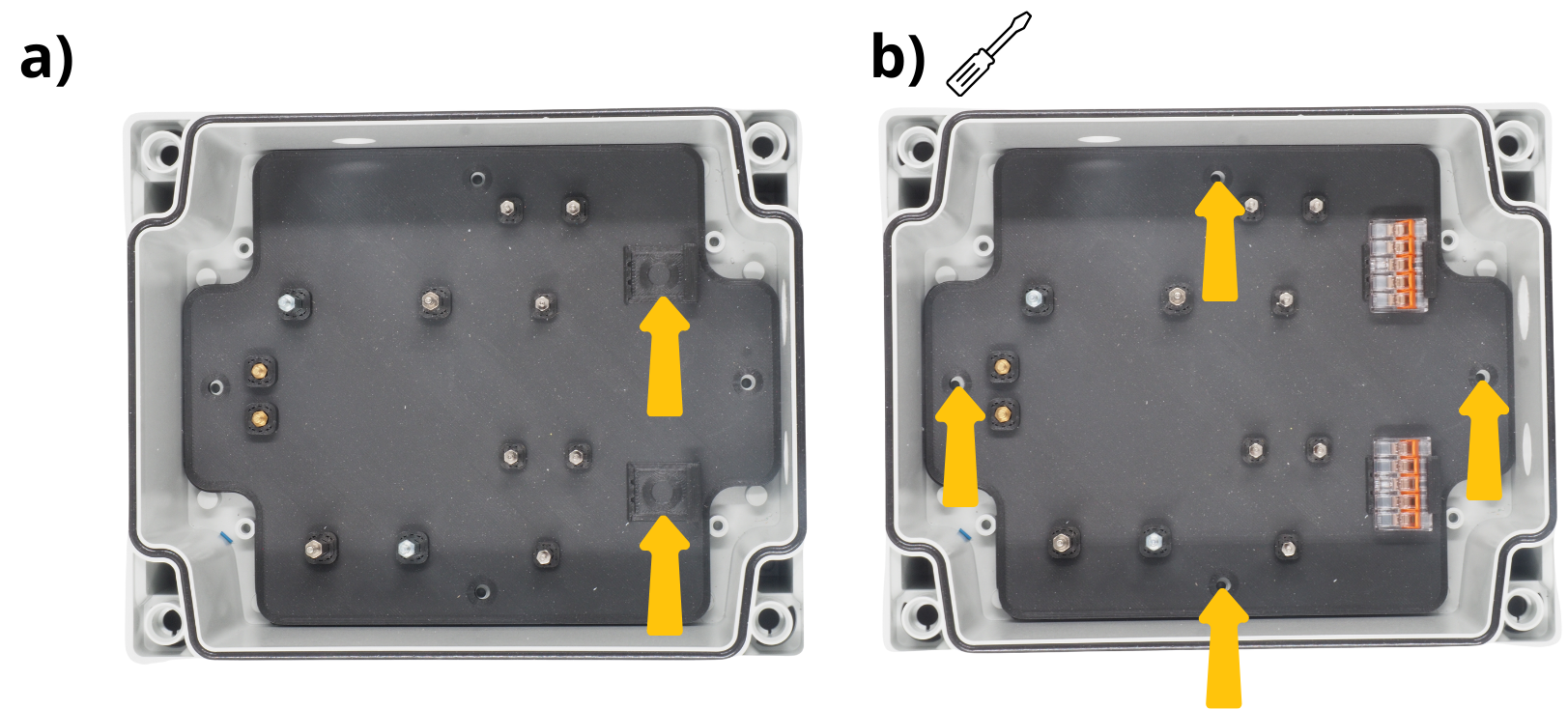
Fixer à l’aide d’écrous M3 la carte Gravity RTC sur les Entretoise prévues à cet effet.
Fixer à l’aide d’écrous M3 l’empilement de carte Arduino sur les Entretoise prévues à cet effet (au dessus de la carte Gravity RTC). Placer les Module Grove Voltage Divider et Module Grove Relay sur les Entretoise M2 restantes.
3. Branchement de l’alimentation des cartes Arduino#
Note
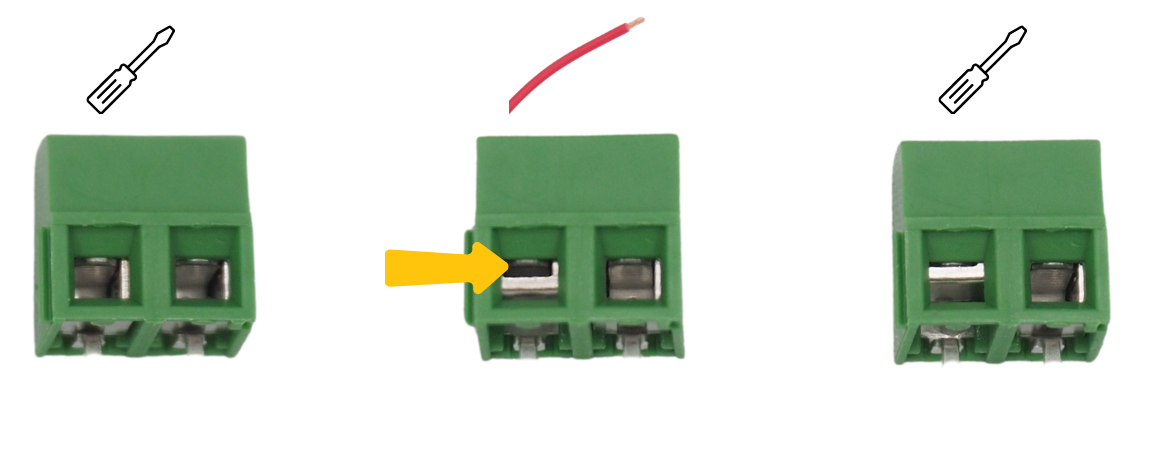
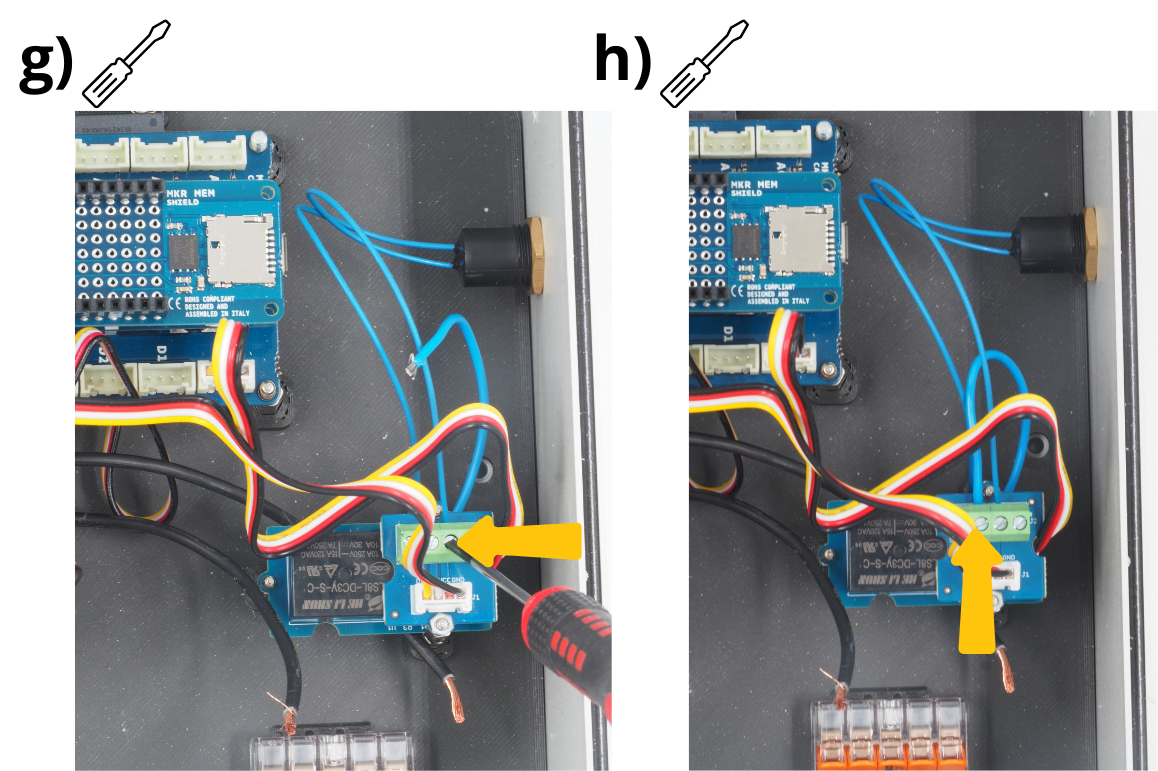
Pour les étapes qui suivent, il vous sera réguliérement demandé d’insérer des câbles dans différents Bornier à vis, puis de les visser. Pour cela, il sera parfois nécessaire de d’abord dévisser le Bornier à vis (voir image), afin de l”ouvrir, et permettre d’y insérer un câble avant de revisser pour fermer le bornier sur câble.
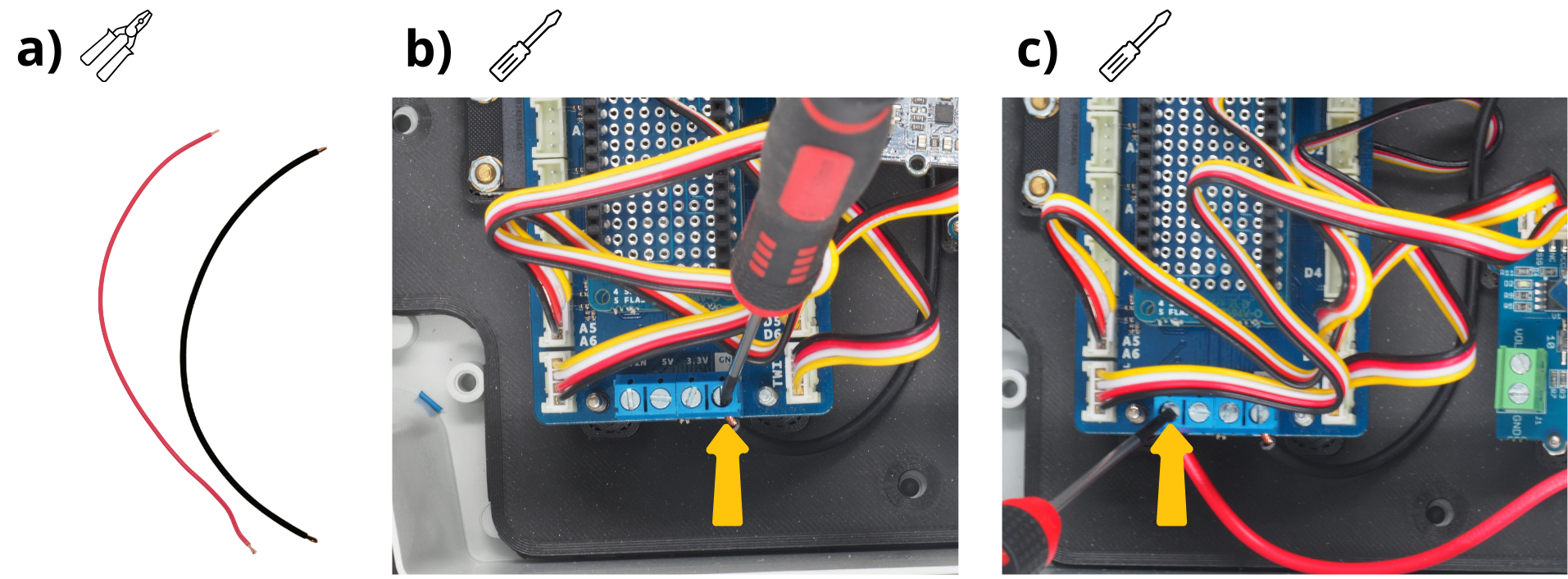
Couper et dénuder un câble rouge et un câble noir de 20 cm.
Insérer le câble noir dans le Bornier à vis GND de la Arduino MKR Connector Carrier, puis le visser.
Insérer le câble rouge dans le Bornier à vis VIN de la Arduino MKR Connector Carrier, puis le visser.
4. Branchement du Module Grove Voltage Divider#
Note
Pour les étapes qui suivent, il vous sera réguliérement demandé d’insérer des câbles dans différents Bornier à vis, puis de les visser. Pour cela, il est d’abord nécessaire de dévisser le Bornier à vis (voir image), afin de l”ouvrir, et permettre d’y insérer un câble avant de revisser pour fermer le bornier sur le câble.
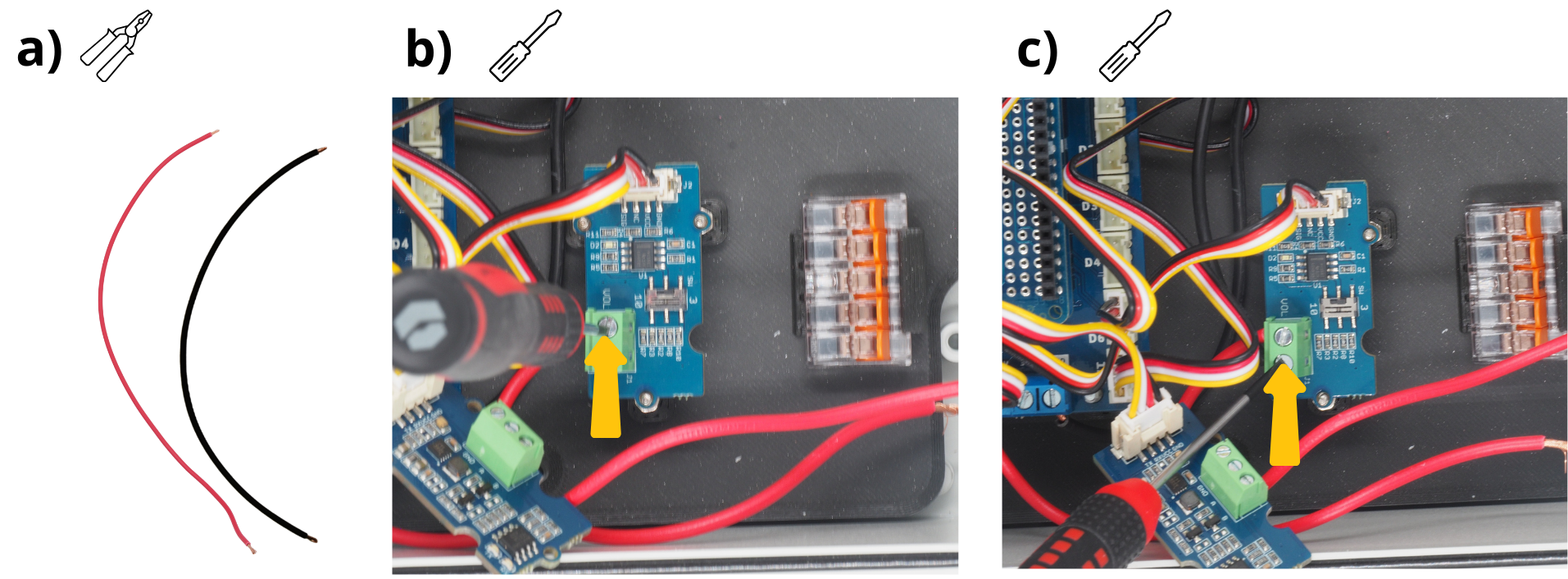
Couper un câble rouge et un câble noir de 15 centimètres, puis dénuder leurs extrémités à l’aide d’une pince à dénuder.
Insérer le câble rouge dans le Bornier à vis VOL du Module Grove Voltage Divider et le visser.
Insérer le câble noir dans le Bornier à vis GND du Module Grove Voltage Divider et le visser.
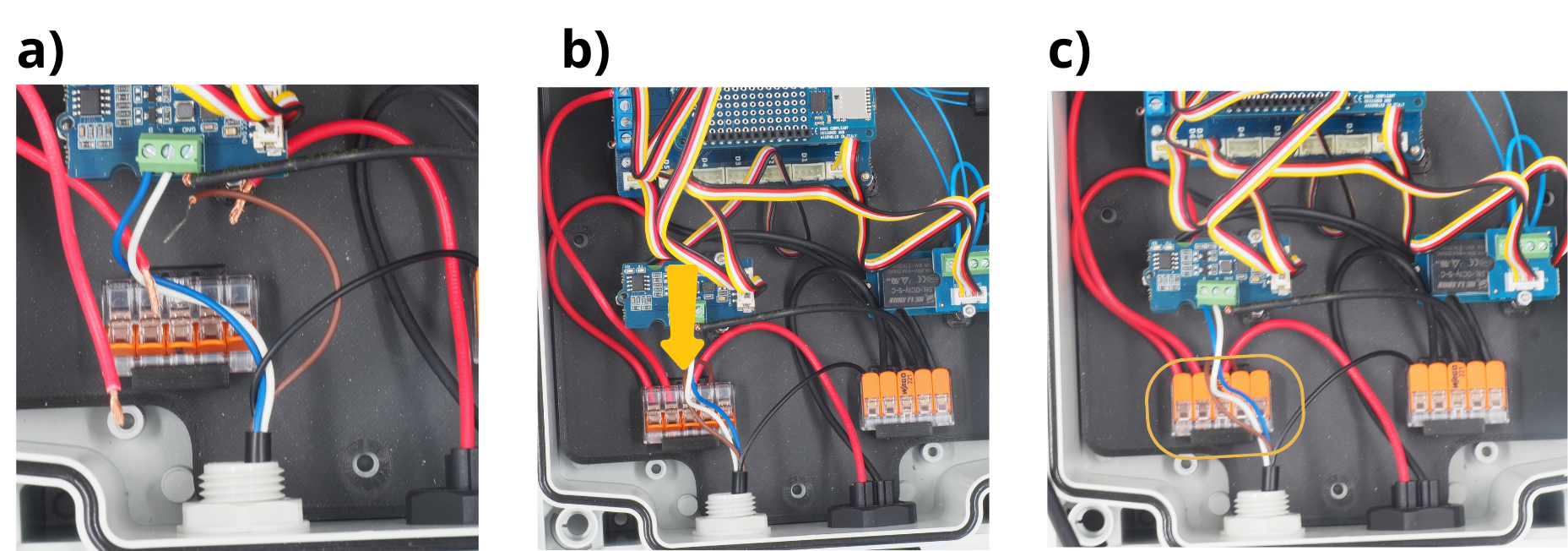
5. Branchement et fixation du bouton poussoir#
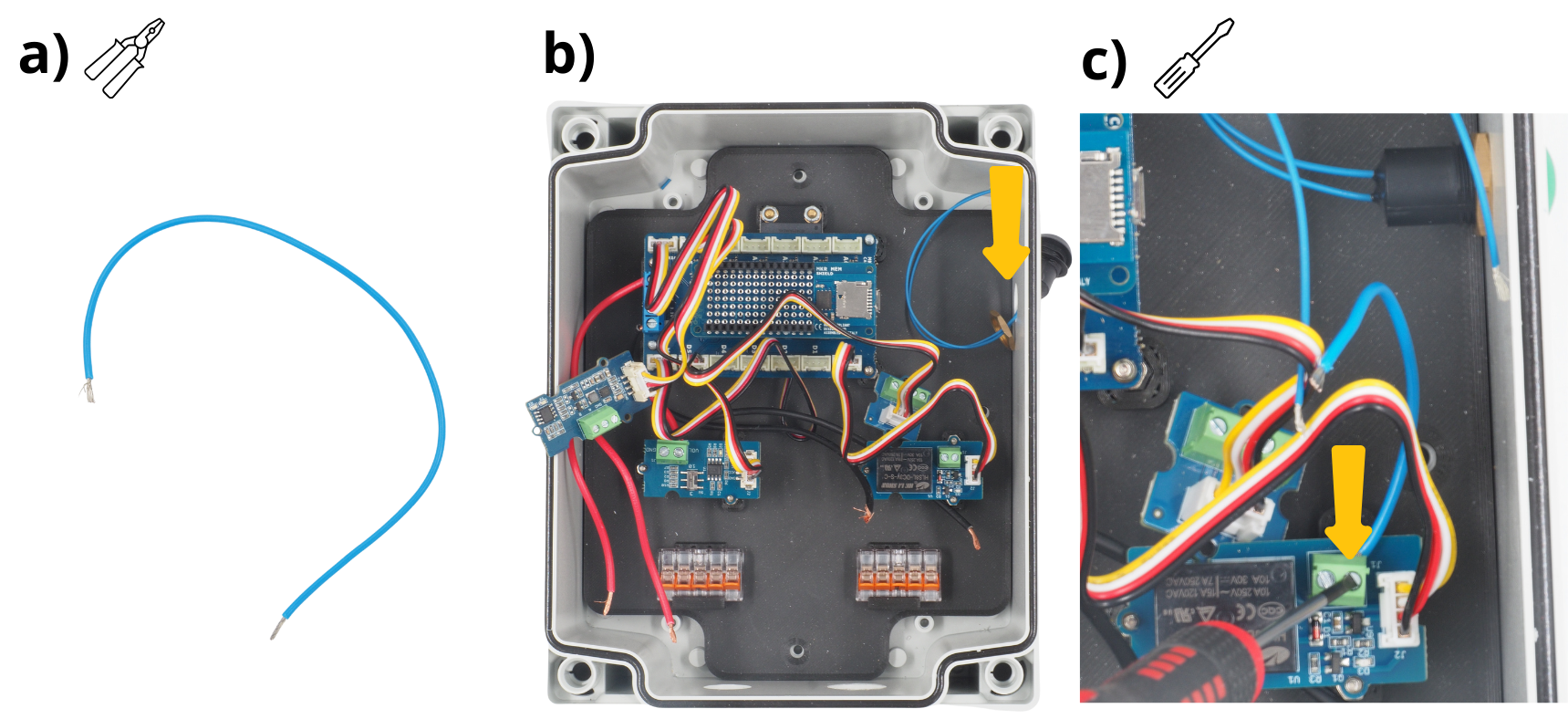
Couper un câble de 10 centimètres, puis dénuder ses extrémités à l’aide d’une pince à dénuder. La couleur du câble n’a pas d’importance.
Prendre le bouton poussoir, dénuder l’extrémité de ses 2 câbles, puis l’insérer dans le trou prévu à cet effet. Le fixer avec la vis et le joint fourni avec.
Insérer une des extrémités du câble bleu dans un des Bornier à vis (au choix) du Module Grove Relay, puis le visser.
Attention
Le joint du bouton poussoir doit-être placé à l’extérieur de la boîte.
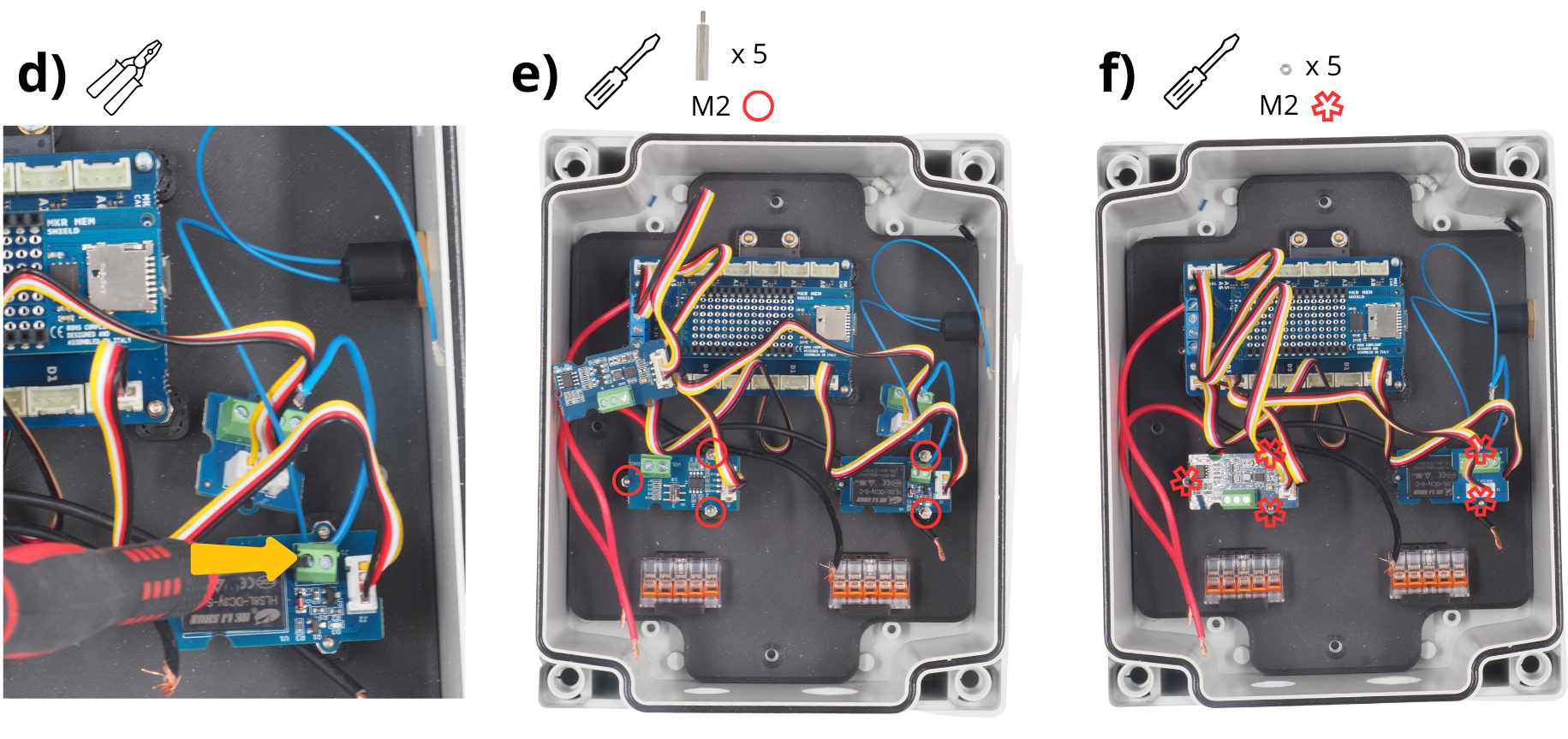
Insérer un des câbles (au choix) du bouton poussoir dans le Bornier à vis du Module Grove Relay restant, puis le visser.
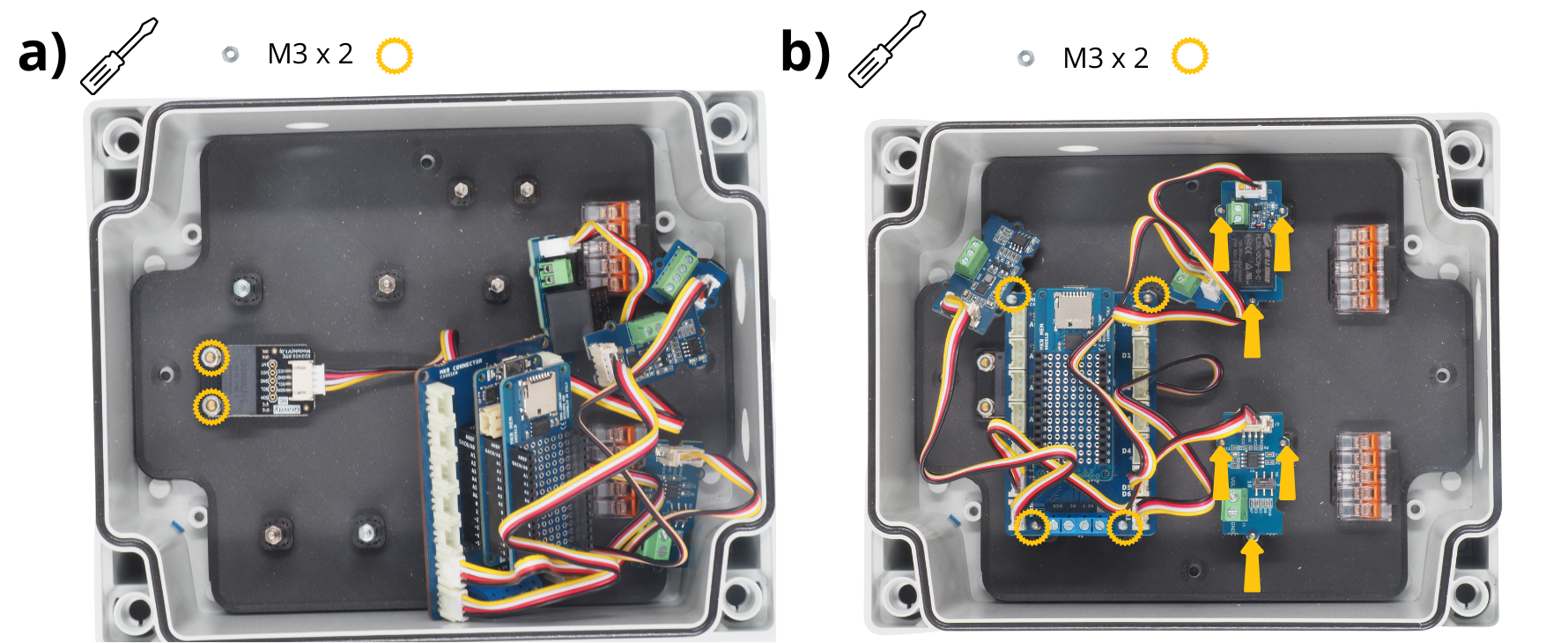
Fixer à l’aide d” Entretoise M2 le Module Grove Voltage Divider ainsi que le Module Grove Relay.
Placer sur les Entretoise du Module Grove Voltage Divider le Module Grove RS485, et sur les Entretoise du Module Grove Relay le Module Grove Screw Terminal. Les fixer à l’aide d’écrous M2.
Insérer l’autre câble du bouton poussoir dans le Bornier à vis du « VCC » du Module Grove Screw Terminal, puis le visser.
Insérer l’extrémité du câble restante dans le Bornier à vis du « D2 » du Module Grove Screw Terminal, puis le visser.
6. Alimentation Centrale Setier débit#
La partie suivante consiste à faire le câblage du bloc d’alimentation de la Centrale Setier Setier. Ce bloc devra être branché à une prise 22O V lors de l’utilisation de la centrale.
Couper et dénuder un câble rouge et un câble noir de 20 cm.
Prendre la connecteur d’alimentation panneau traversante.
Insérer une extrémité du câble rouge dans le Bornier à vis « 1 » du connecteur d’alimentation panneau traversant, puis le visser.
Insérer une extrémité du câble noir dans le Bornier à vis « 2 » du connecteur d’alimentation panneau traversant, puis le visser.
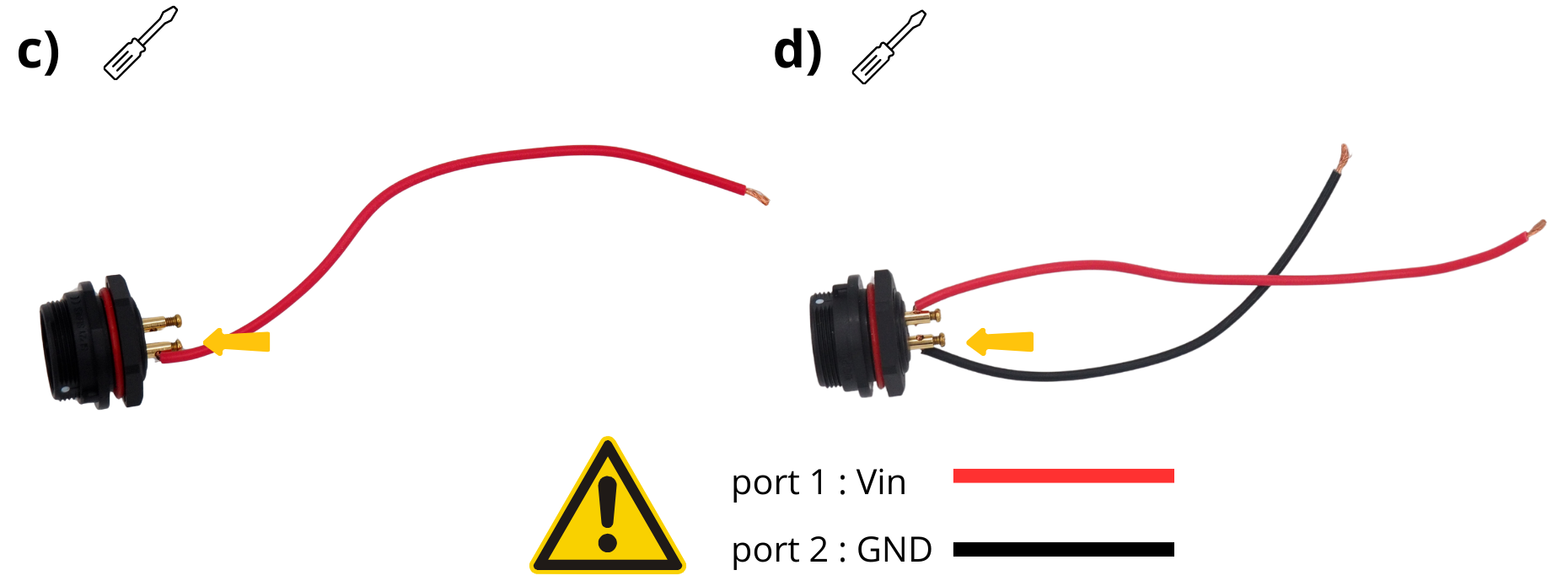
Attention
Afin d’éviter tout court-circuit entre le câble GND (Noir) et le câble VIN (Rouge), ajouter une gaine thermorétractable.
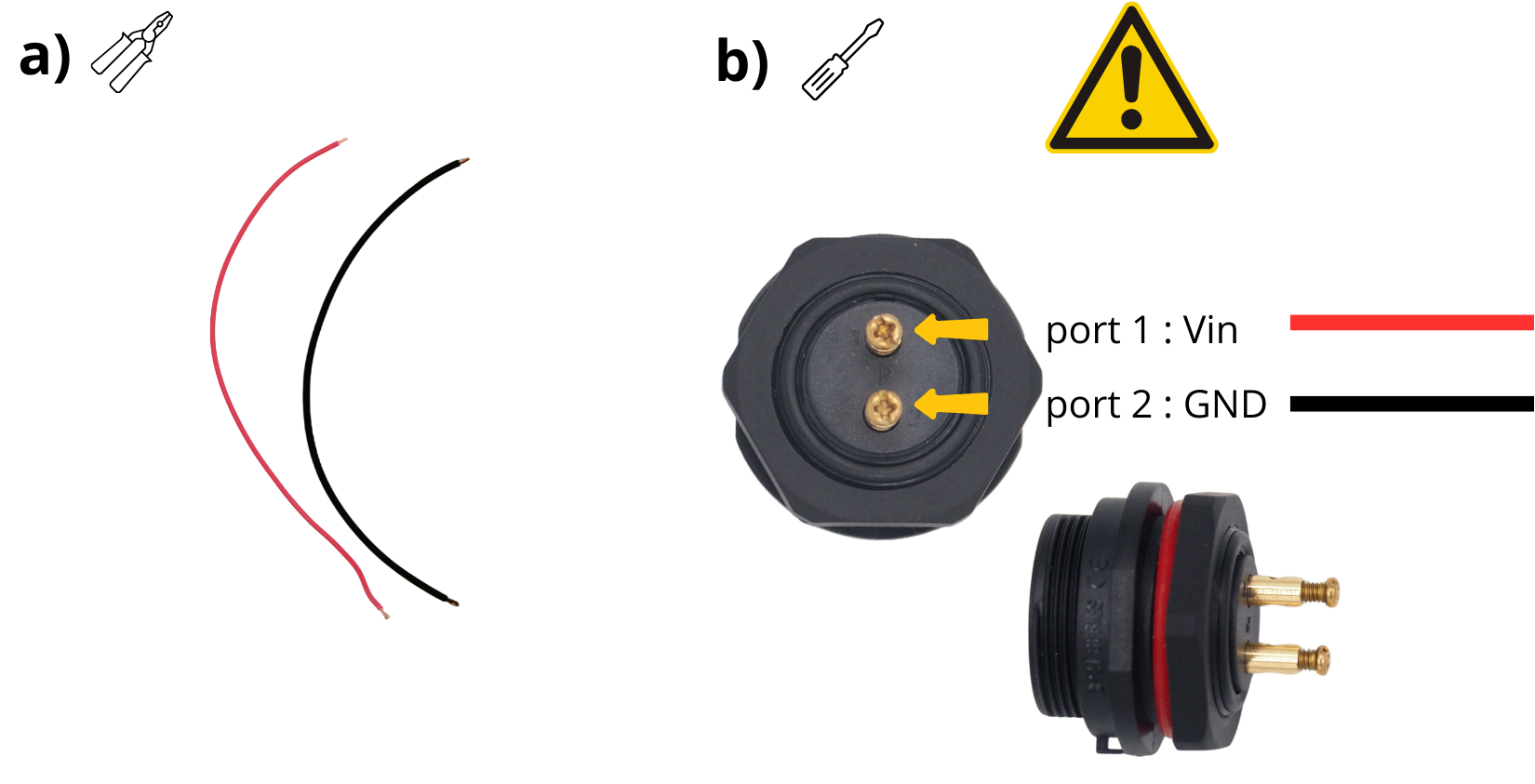
Prendre le connecteur d’alimentation panneau.
Dévisser-le afin d’accéder aux vis de connexion.
Observer les indications inscrites autour de celle-ci (port « 1 » et port « 2 »).

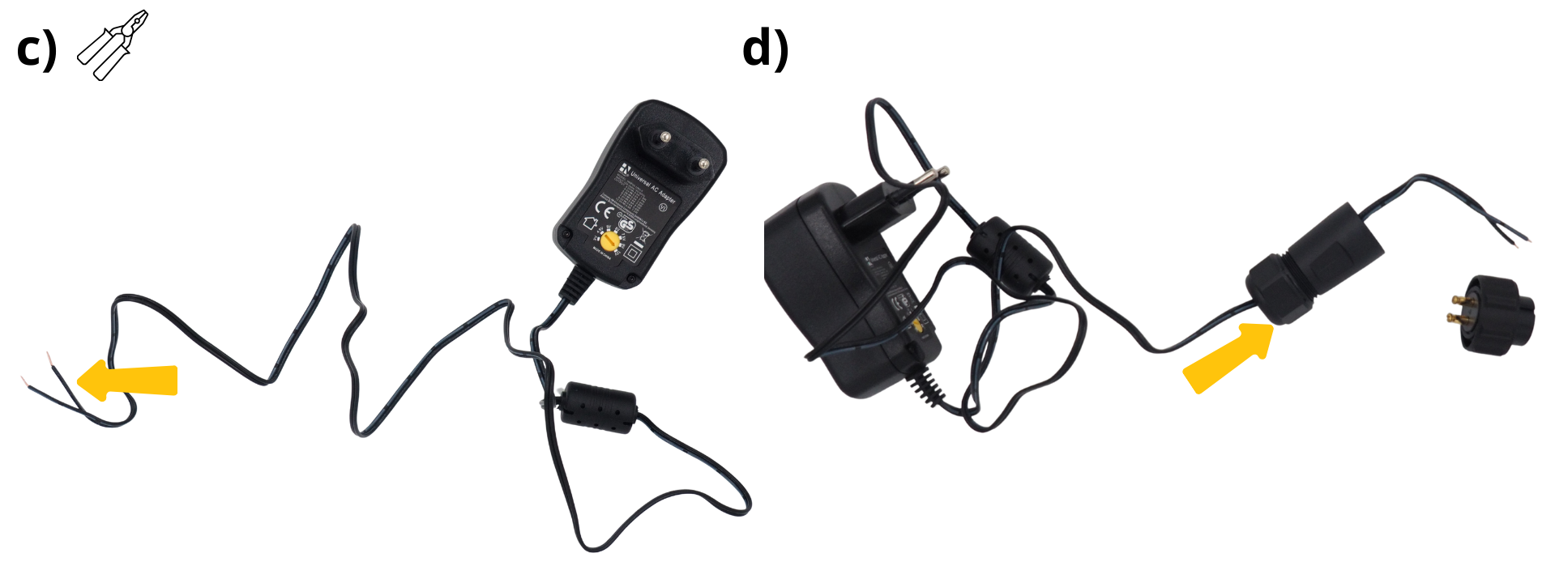
Prendre la prise d’alimentation 220 V - 12 V, puis le retourner. Utiliser un tournevis afin de régler la sortie de cette Alimentation sur 12 V.
Couper l’extrémité de cette prise d’alimentation.
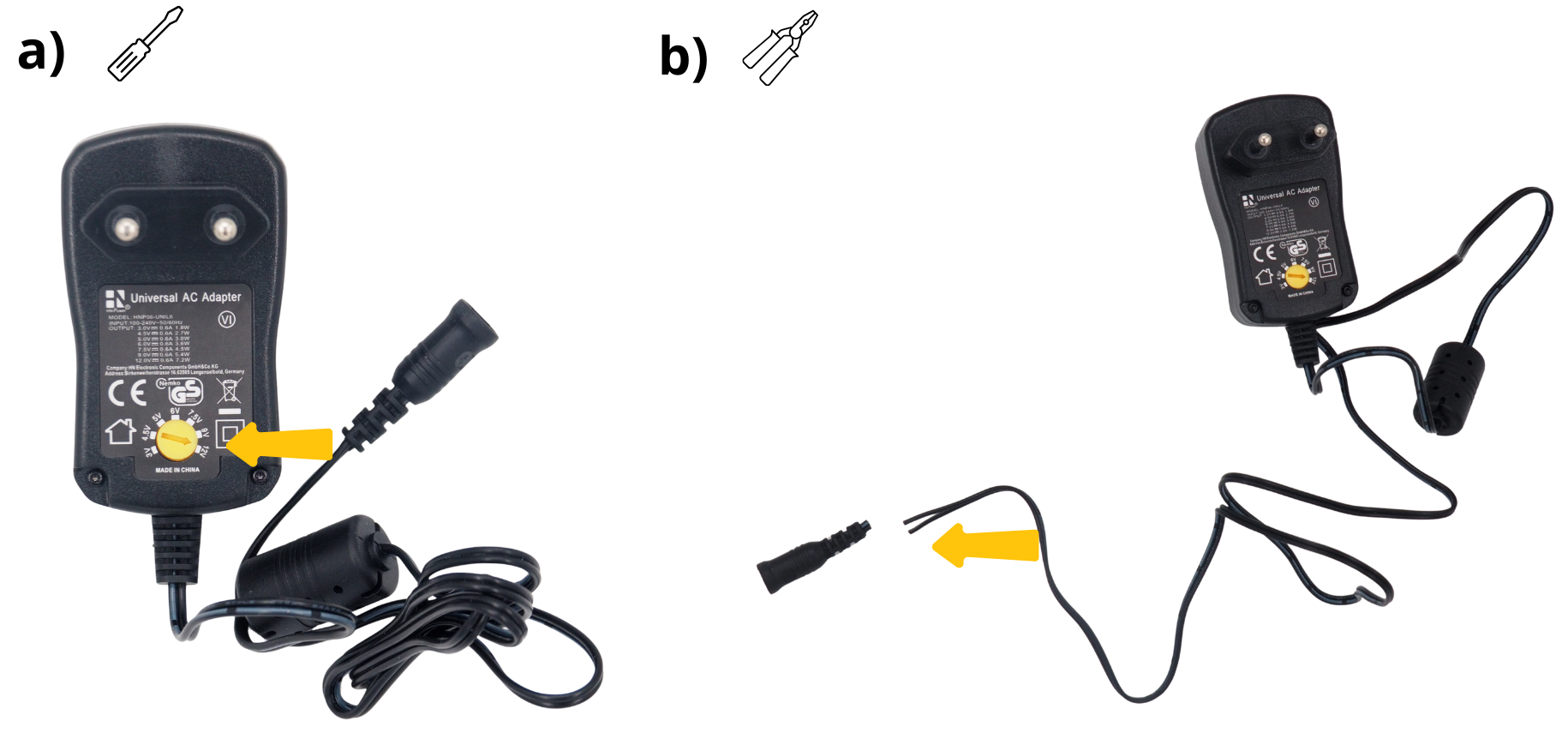
Dénuder les deux câbles sur cette même extrémité.
Passer la partie Presse-étoupe du connecteur extérieur d’alimentation.
Insérer le câble blanc dans le Bornier à vis « 1 » du connecteur d’alimentation panneau. Attention à bien connecter le bon câble sur le bon bornier.
Insérer le câble noir dans le Bornier à vis « 2 » du connecteur d’alimentation panneau. Attention à bien connecter le bon câble sur le bon bornier.
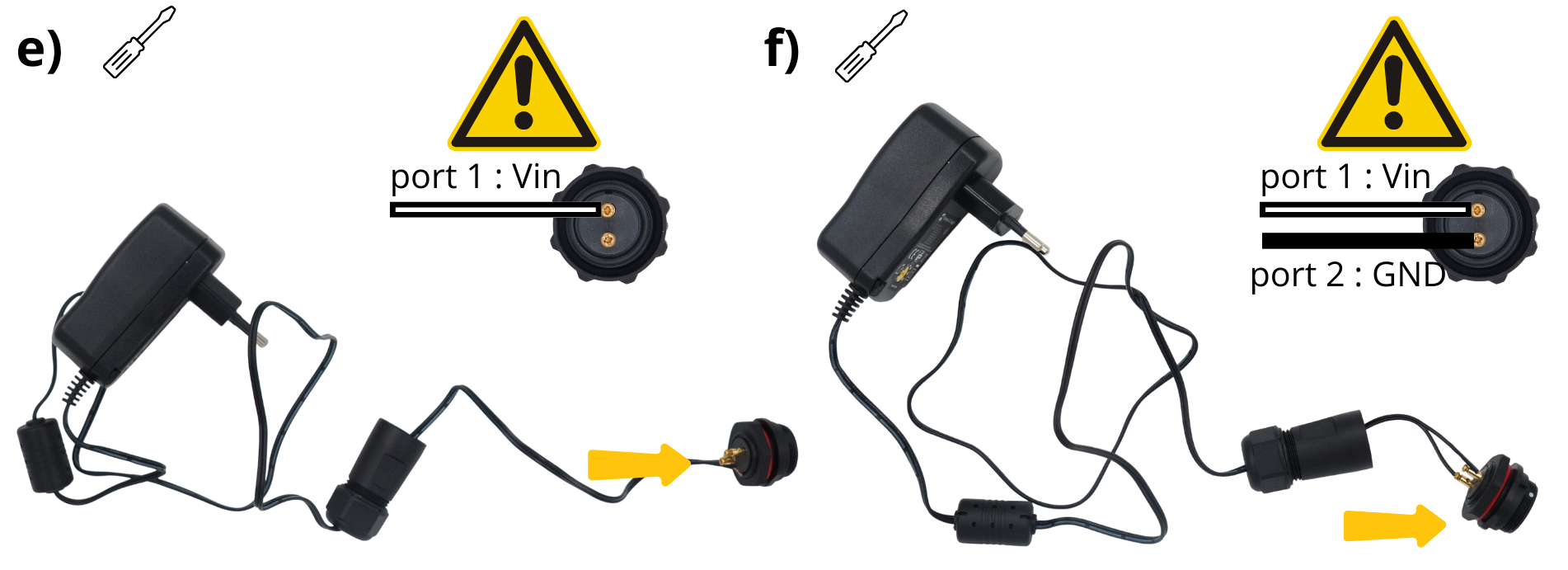
Visser le Presse-étoupe sur le connecteur précédemment raccordé.

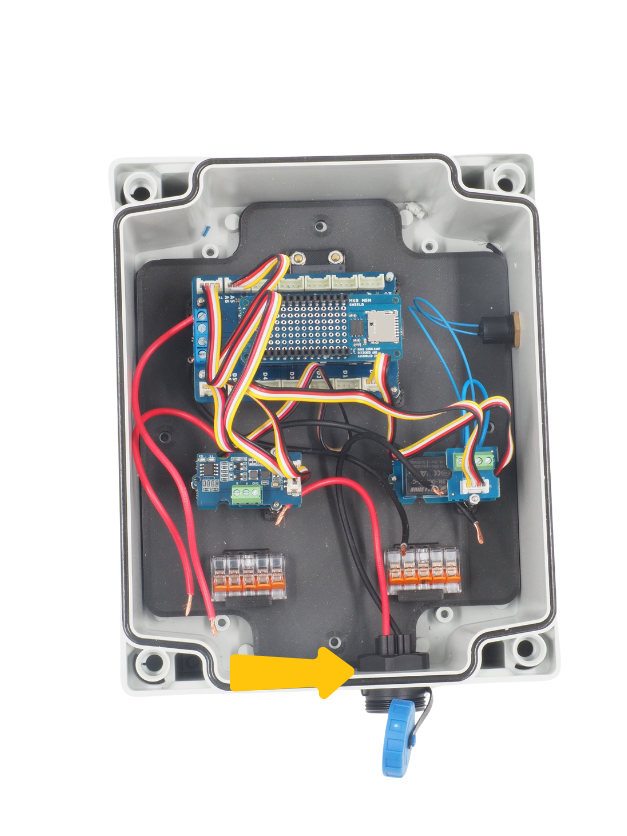
Le bloc d’alimentation est désormais prêt. Insérer le bloc d’alimentation de la Centrale Setier dans le trou prévu à cet effet. Puis, fixer-le à l’aide de l’écrou fourni.
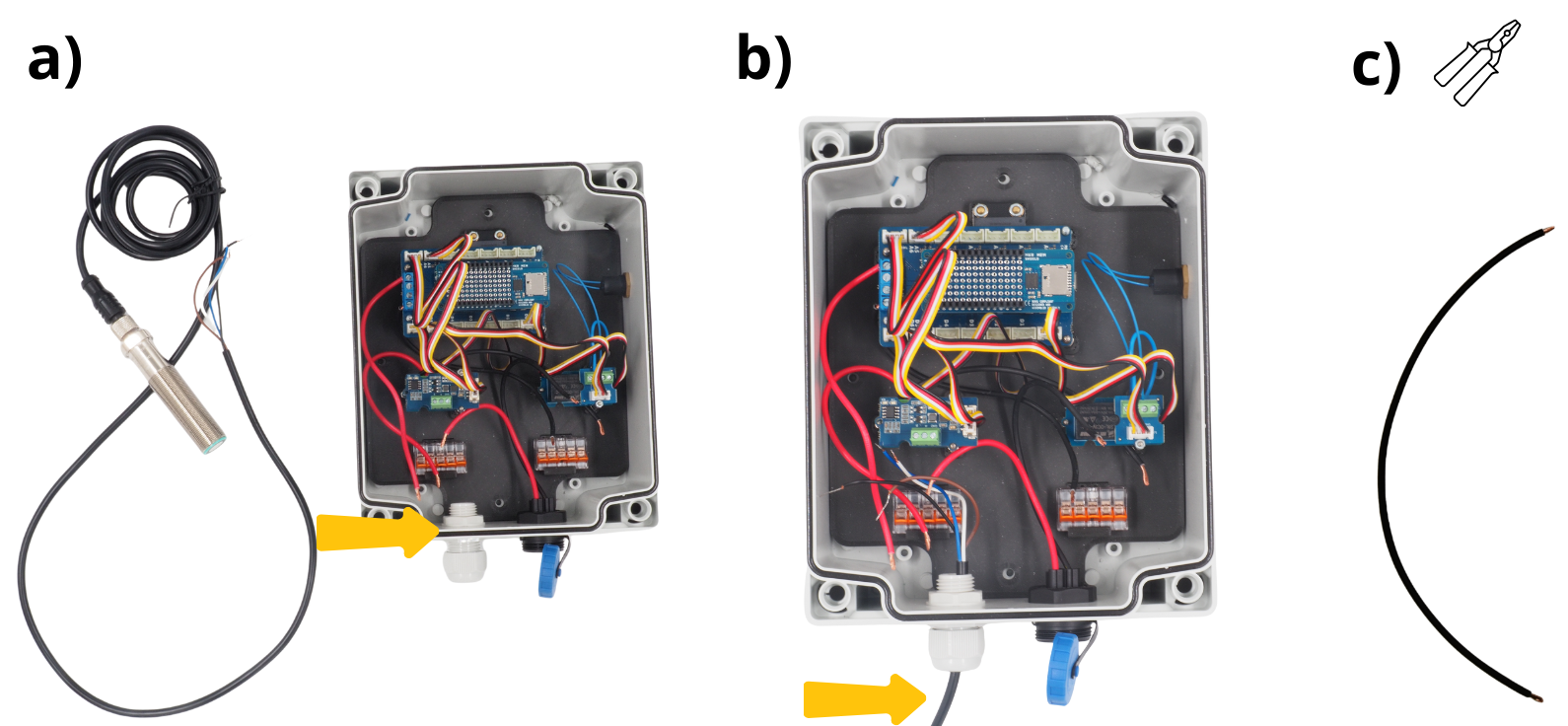
7. Branchement du Capteur SEN0358#
Mettre en place le Presse-étoupe M16 dans le trou prévu à cet effet, puis le dévisser côté extérieur.
Faire passer le câble du capteur SEN0358 dans le Presse-étoupe, puis fixer le Presse-étoupe en le serrant avec l’extrémité précédement dévissée.
Couper un câble noir de 15 centimètres, puis dénuder ses extrémités à l’aide d’une pince à dénuder.
Insérer une extrémité du câble noir du capteur dans le Bornier à vis GND du module Module Grove RS485. le visser.
Insérer l’extémité du câble blanc en provenance du capteur dans le Bornier à vis A du module Module Grove RS485. le visser.
Insérer l’extémité du câble bleu en provenance du capteur dans le Bornier à vis B du module Module Grove RS485. le visser.
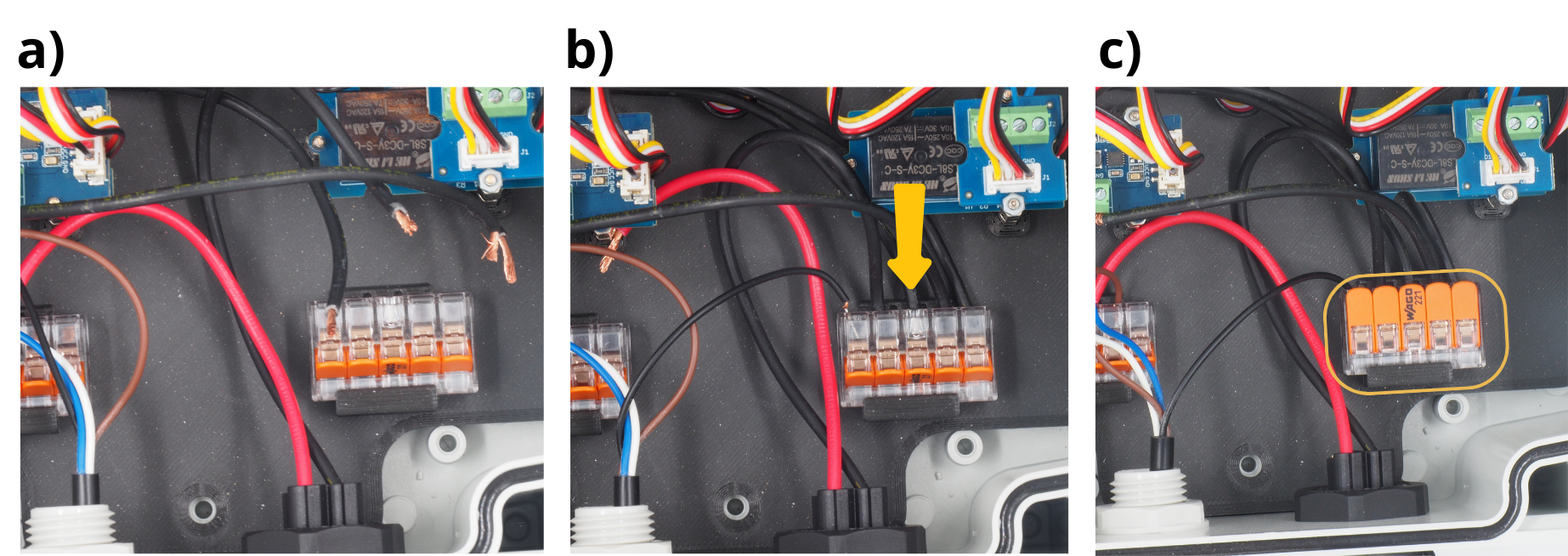
8. Branchement de la masse GND des différents éléments sur une Borne de connexion WAGO#
Ouvrir 5 leviers de la premiere Borne de connexion WAGO.
Insérer dans chacun de ces leviers l’extrémité restante des câbles noirs suivant : en provenance du Module Grove RS485, en provenance du capteur SEN0358, en provenance du Module Grove Voltage Divider, en provenance du bloc d’alimentation et en provenance de la carte Arduino MKR Connector Carrier.
Fermer les 5 leviers connectés de la Borne de connexion WAGO.
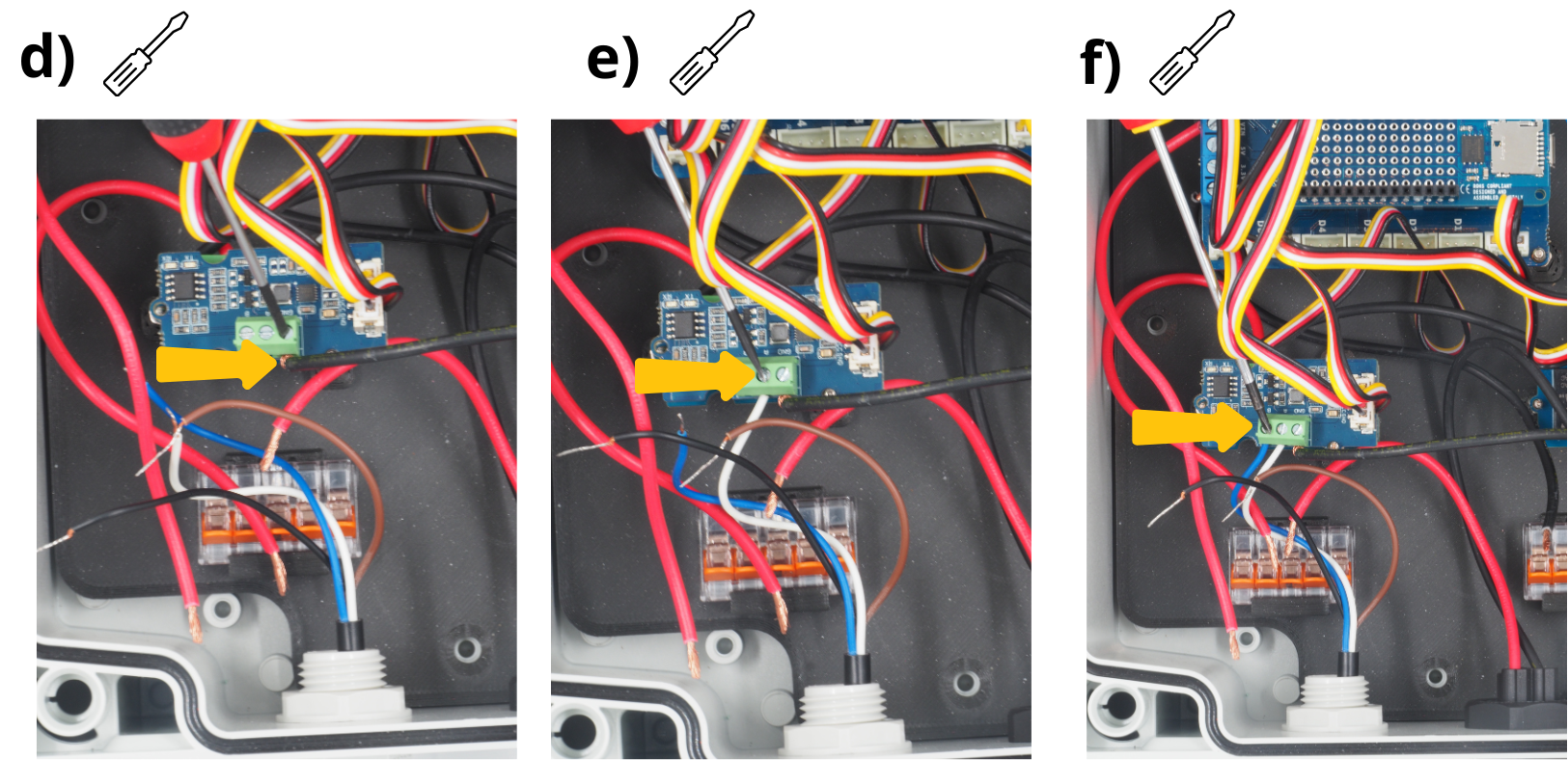
9. Branchement de l’alimentation 12 V des différents éléments sur une Borne de connexion WAGO#
Ouvrir 4 leviers de la premiere Borne de connexion WAGO.
Insérer dans chacun de ces leviers l’extrémité restante des câbles rouges suivant : en provenance du capteur SEN0358, en provenance du Module Grove Voltage Divider, en provenance du connecteur d’alimentation panneau et en provenance de la carte Arduino MKR Connector Carrier.
Fermer les 4 leviers connectés de la Borne de connexion WAGO.
11. Fermeture de la Boîte et alimentation du Boitier#
Prendre la boîte et placer son couvercle dessus.
Fermer la boîte en vissant le couvercle à l’aide des 4 vis fournies.
Prendre la prise pour alimentation de la centrale et la connecter au bloc d’alimentation.
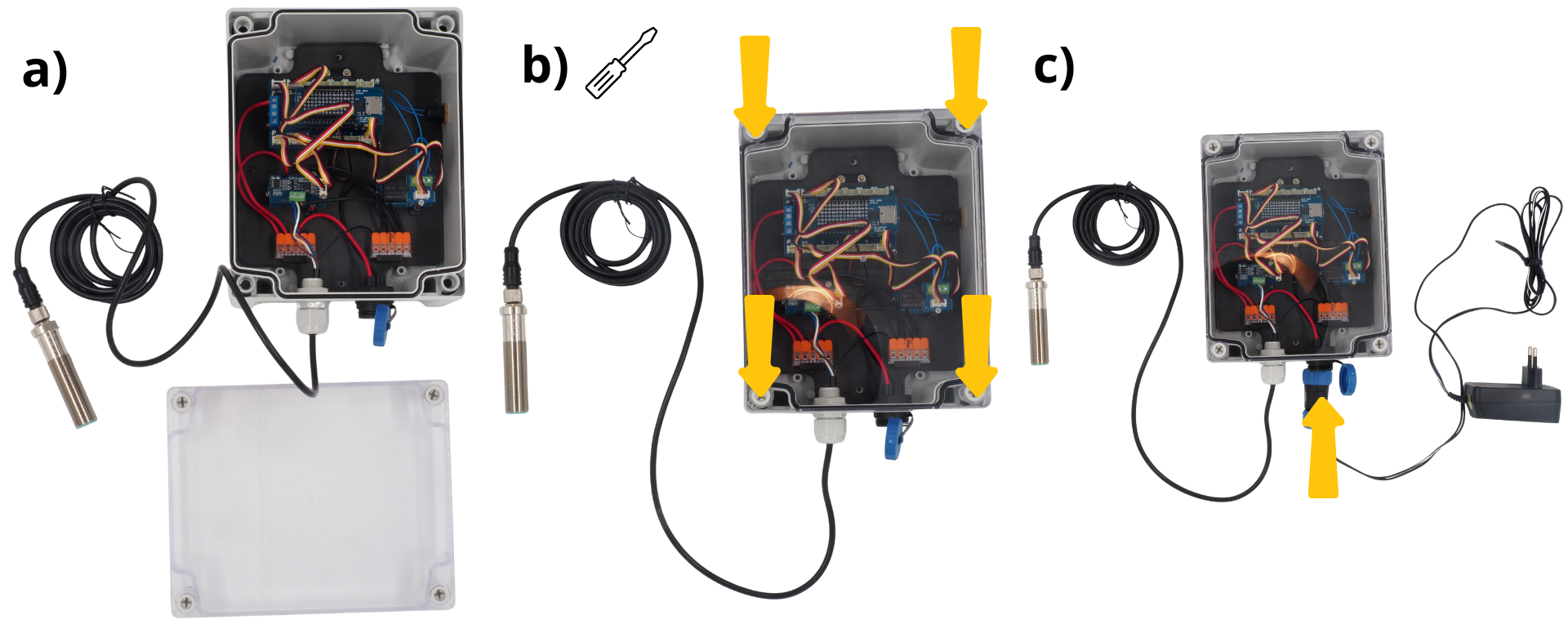
La Centrale Setier débit est prête à être programmée, puis utilisée.